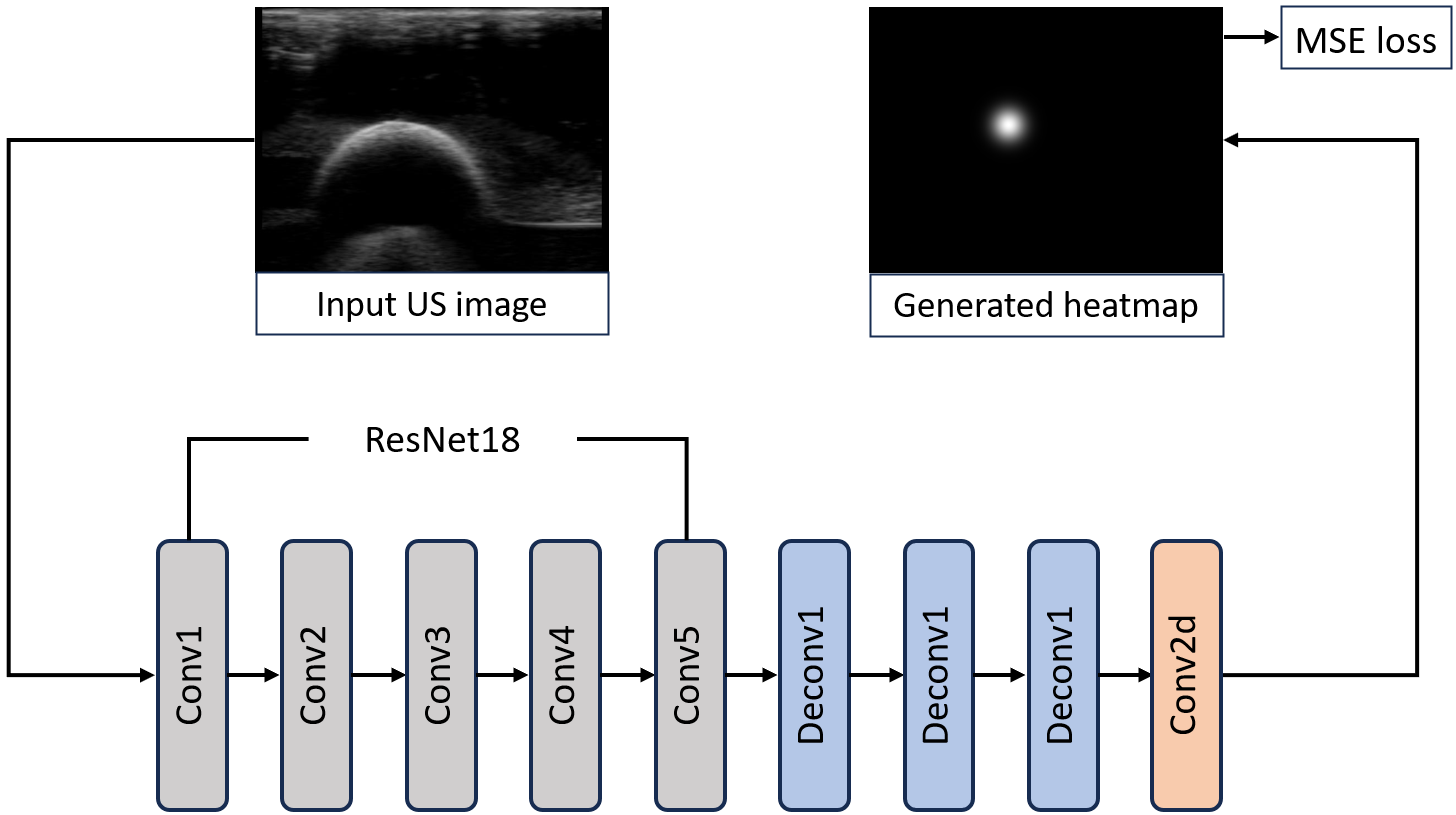
We present a framework combining ResNet deep learning with time-invariant dynamical systems to enhance robotic ultrasound-guided scanning. Our approach enables robots to fulfill multiple objectives concurrently – sustaining uniform contact pressure and achieving exact positioning – while preemptively adjusting dynamics to maintain stable patient interaction. Experimental validation on a UR5 robotic arm demonstrates stable scanning with force tracking RMSE as low as 2.54N, and the deep learning model achieves 80% accuracy in organ detection.
@inproceedings{liuchen2024dynamical,title={A Dynamical System Approach to Robotic Ultrasound Imaging: Towards Intrinsically Stable Robotic Sonography},author={Liuchen, Wanli and Duan, Anqing and Song, Zirui and Victorova, Maria and Navarro-Alarcon, David},booktitle={2024 IEEE International Conference on Real-time Computing and Robotics (RCAR)},pages={647--652},year={2024},publisher={IEEE},}